

We at OKAPI:Orbits GmbH develop a smart Space Surveillance and Tracking (SST) software called OKAPI, which can be used to analyze the interaction of single satellites with the whole space debris environment. With our partners from Morpheus Space, we used this software to assess the performance of their electrical propulsion system NanoFEEP for CubeSats. The NanoFEEP thruster was for the first time successfully ignited in space on February 26th 2019. Since then, the smallest electrical propulsion system for satellites has been operational for more than 6 months.
“Sustainable spaceflight includes avoiding collisions, for small satellites just as much as for large ones.” – Carsten Wiedemann, Space Debris Expert from TU Braunschweig
Together, we wanted to answer the question, whether NanoFEEP can be used to perform collision avoidance and therefore enable sustainable operations of CubeSats.
Impact of maneuvers on the distance to objects
The NanoFEEP is hosted on UWE-4, a 1U CubeSat from TU Würzburg in Germany. It is located in an almost circular 590 km x 571 km, 92° inclined orbit. For this analysis we have considered a worst case scenario where the NanoFEEPs can only be operated when the satellite is illuminated by the Sun and the maximum thrust produced is only 16 uN. Thus only 30 minutes of thrust can be obtained during a complete orbit of approx. 90 minutes.
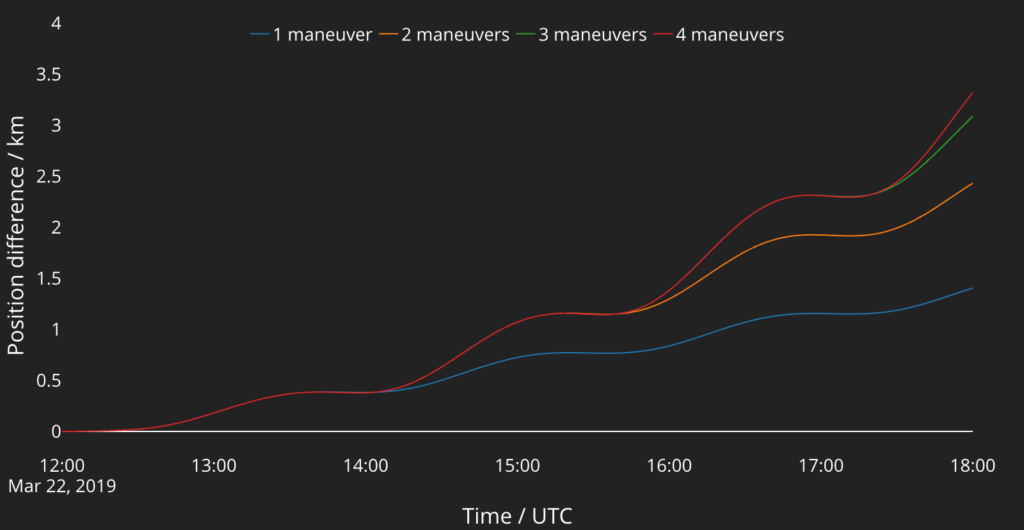
In the first analysis, we wanted to find out, how much the satellite’s position changes over time, when performing one or more maneuvers. The results are shown in the graph below. The blue line shows the position difference after performing one maneuver compared to a trajectory without any maneuver. Over 8 hours, a change between 1.4 and 3.3 km in the position can be achieved.
How many maneuvers are needed to save the CubeSats?
The position change required to securely avoid a collision always depends on the encounter. We constructed
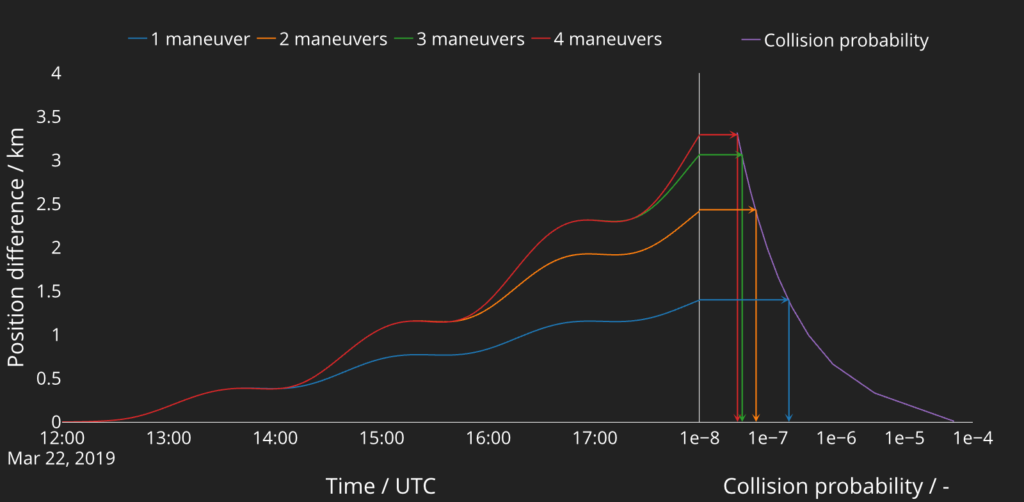
It needs to be noted that until this point, we did not consider uncertainties of any kind. In reality, one would have to deal with at least:
- uncertainty in the thrust that is generated,
- the pointing accuracy of the satellites,
- the uncertainty in the actual position of the satellite.
When considering these, we would rather require three maneuvers to reach the threshold. We furthermore simulated a very short time frame. When performing maneuvers well in advance of a conjunction, generally much smaller changes are sufficient. We will cover these topics deeper in following posts.
Our conclusion
With our analysis, we could show that collision avoidance using electrical propulsion systems such as the NanoFEEP is possible. This measure is an important step for CubeSats to operate sustainably in the Low Earth Orbit environment without creating new space debris.
Our take-home messages for you:
- Although small, CubeSats should be operated sustainably and perform collision avoidance,
- Using electric propulsions systems for collision avoidance for CubeSats is possible,
- The number of maneuvers needed to avoid a collision is small, in our example 2 -3 maneuvers.
If you are interested in this topic or would like to find out more about the capabilities of your CubeSat or electrical propulsion system, we would love to get in touch with you! Leave a comment or an e-mail to: contact@okapiorbits.space.
One thought on “Space Debris – Can CubeSats be used sustainably?”