OKAPI:Aether
Product Overview
Our product OKAPI:Aether offers an entire Space Surveillance and Traffic (SST) suite with a specialized focus on Risk Monitoring and Collision Avoidance for satellite operators. Risk Monitoring Service is used to analyze the close approaches of your spacecraft. Using beyond state-of-the-art algorithms we analyze conjunctions and classify them. On the other hand, Collision Avoidance Service safeguards your satellite by suggesting action if needed. The table below highlights the features that are included in the service packages.
Risk Monitoring Service
| Feature | Description |
|---|---|
| CDMs | Automatically downloads CDMs from Space-Track and introduces them into the platform. Also allows addition of EUSST or own CDMs. CDMs are grouped into events. |
| Add Satellite | Add satellites to the company. Contains NORAD ID, cross-section, mass, info on propulsion system, accepted risk levels, and more. |
| Risk Estimation | Re-computes closest approach based on user-defined input data. Groups risk based on provided accepted risk levels and collision avoidance strategy. |
| Risk Prediction | Uses AI to forecast collision probability until TCA. Applies an adapted risk classification schema to extend decision horizon. |
Collision Avoidance Service
| Feature | Description |
|---|---|
| Maneuver Generation | Computes maneuvers for critical conjunctions based on satellite definition and defined avoidance strategy. |
| Avoidance Check | Checks computed avoidance maneuvers against catalogue for further conjunctions. |
| Orbit Check(only API) | Checks any orbit (incl. maneuvers) against catalogue for futher conjunction. |
| Orbit Propagation(only API) | Propagates an initial state over time using either Neptune or Orekit numerical propagators or the analytical orbit theory SGP4. |
| Pass Prediction(only API) | Computes the visibility of one object over a location on ground based on propagated states. |
Web Interface
Demo and account
If you're interested to know more about OKAPI:Aether, please feel free to schedule a demo. After completing the demo with us, we can set-up an account for you which will help you get started on our platform.
Landing page
You have to sign up once, and confirm your email address. Afterwards, you can start using OKAPI:Aether via the GUI and its API.
The OKAPI:Aether landing page is publicly reachable and can be viewed without an account. It displays the most recent space object population around Earth. The source is the public general perturbations catalogue available from Space-Track.org. It displays the live population and updates the position accordingly.
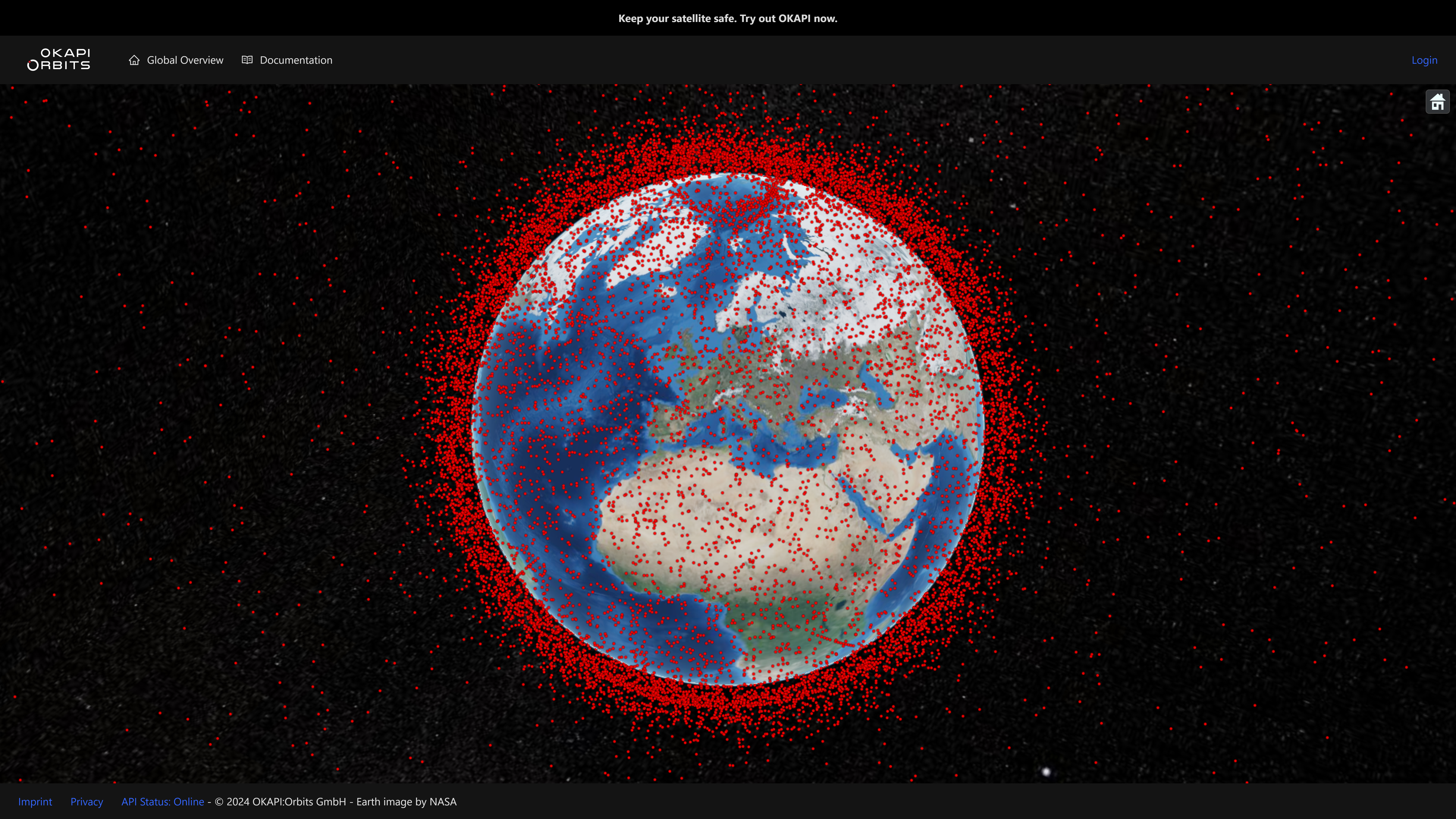
You can rotate around the center of the coordinate system, which at the start is the Earth.
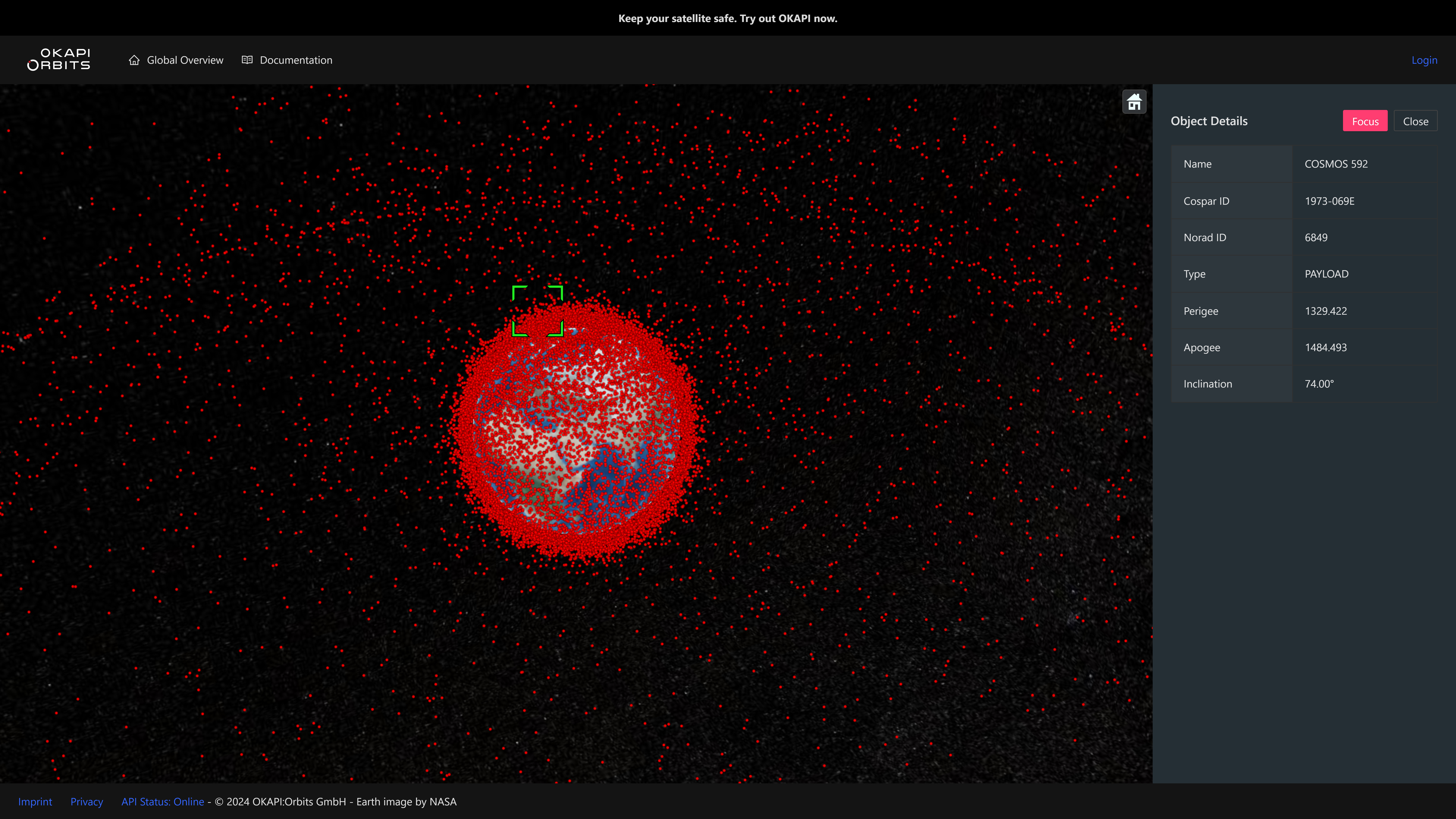
Each object can be selected with single click and details of the object are displayed on the right side of the screen. When clicking twice on an object the camera perspective is changed and the object is placed at the center of the coordinate system. You can now rotate the view around the selected object.
Login
On the top right you can log in to the private side of the platform. Choosing Sign Up in the dialog brings you to the sign up page as discussed in the Sign up section. Log in with your credentials for accessing all functionalities.
Once you're logged in, you shall see the landing page with four tabs: Dashboard, Satellites, Conjunctions and Documentation. We will go through each of them one by one.
Dashboard
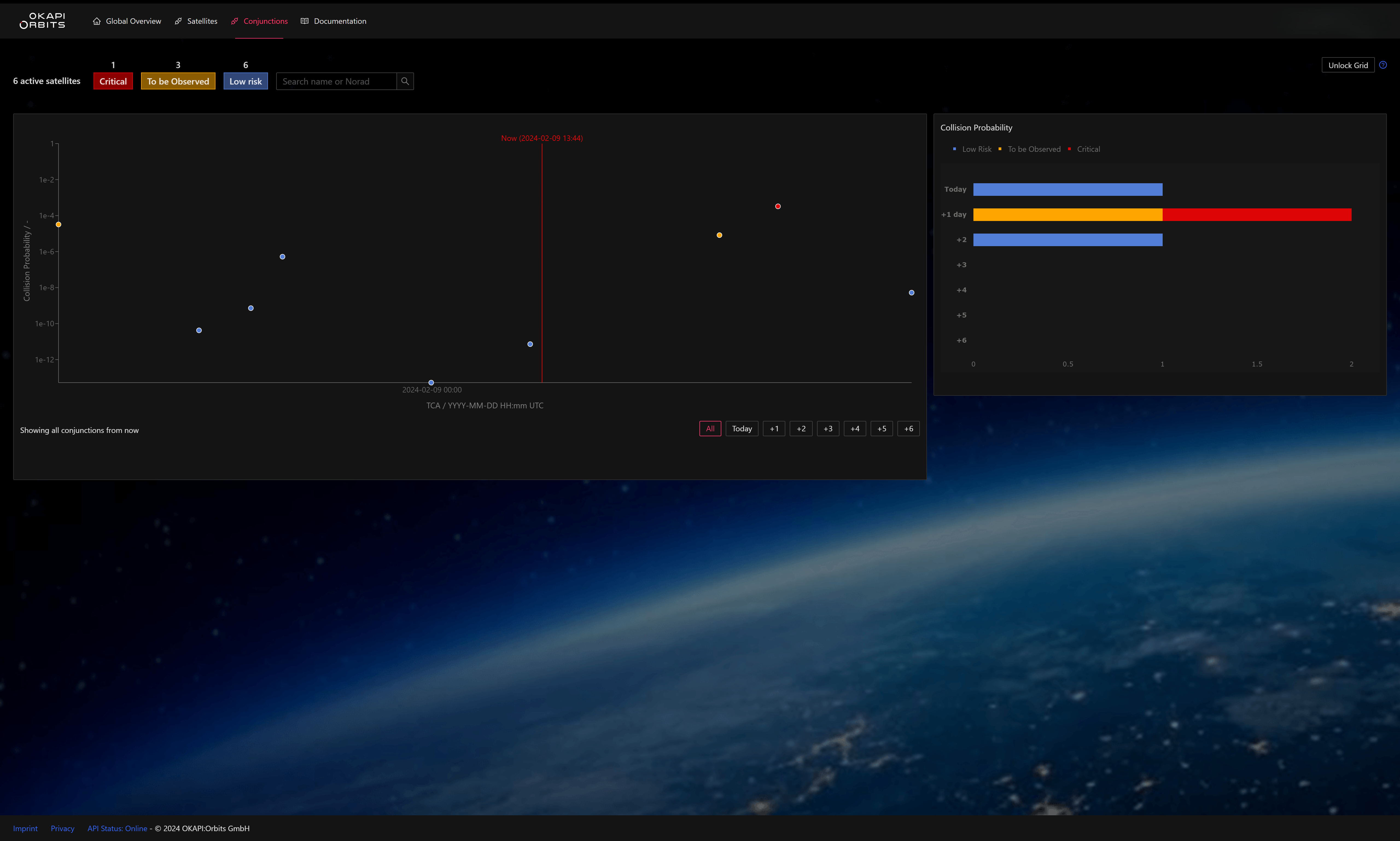
The Dashboard is a graphical way of representing all the conjunctions for the user's satellites in the platform. There are two plots. The first plot shows the conjunctions with respect to the date of conjunction. It provides you the option to categorize your conjunctions. This means that you could view Critical, To-be-observed or Non-critical conjunction by selecting the buttons displayed. Note that Dashboard also allows you to track the recently occurred conjunctions in the past. The red vertical line denotes the current time. There is also an option to choose a time in future. You can view all conjunctions in future or conjunctions up to +n days in future (where n can be any number between 1 and 6).
The second plot is the statistics plot. It denotes the future conjunctions with focus on each of the days, for up to six days in future. Hence, through this plot, the user can understand the share of conjunctions (Non-critical, To-be-observed or Critical) for each of the days. The color codes remain the same as the earlier plot.
With Dashboard, the user gets a holistic view of the conjunctions of all their satellites, both in the past and the future.
Satellites
The 'Satellites' shows you the list of all the satellites that have been added by you to your account. You can view the list of already added satellites as well as add new satellites if required. It lets you define your system, which is operational on orbit and already has a NORAD Id (= unique identifies for your satellite, also called Satellite Catalogue Number), as assigned to your spacecraft by USSPACECOM.
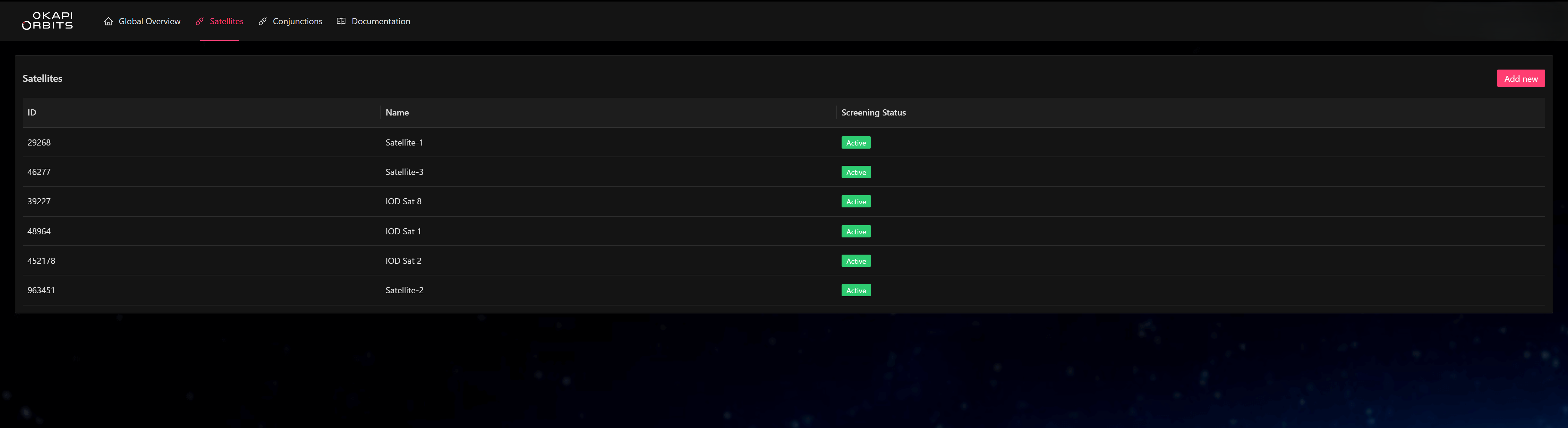
By clicking Add new you will be able to define the input parameters of your spacecraft. We'll go through each of them below:
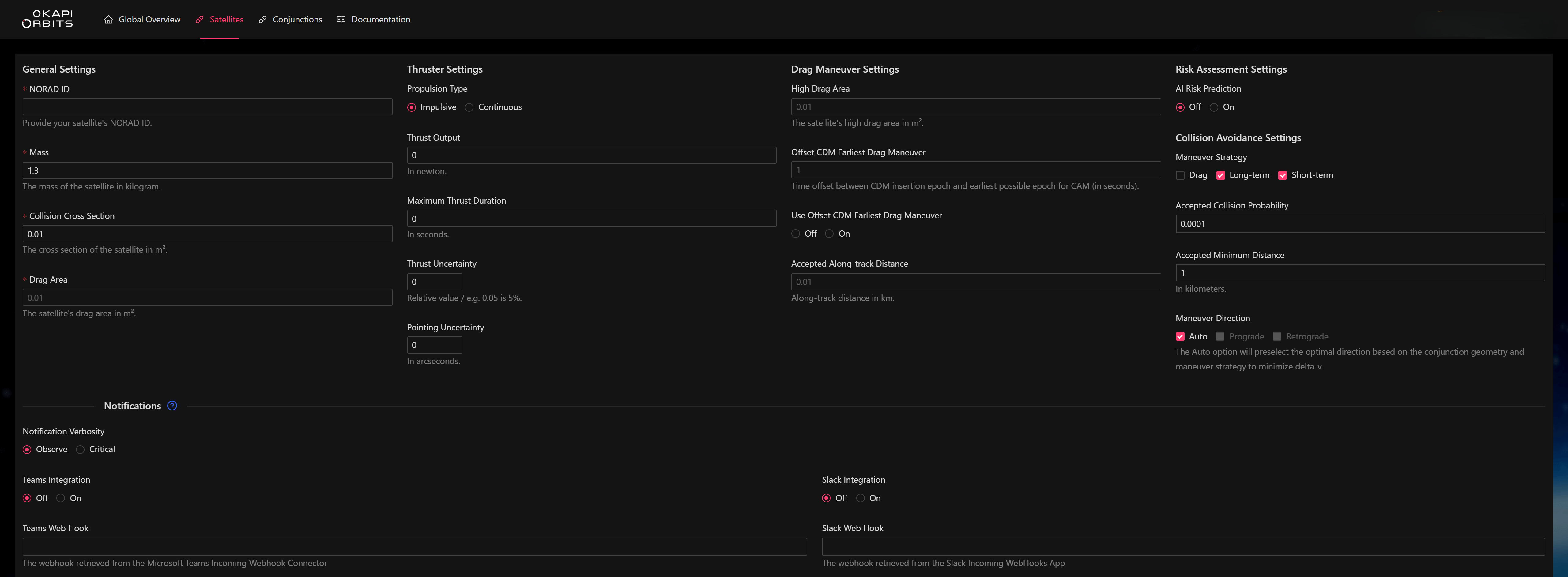
General Settings: The General Settings represents the physical parameters of the spacecraft such as mass, cross-sectional area and so on. They are crucial to gain a good understanding of the spacecraft in orbit and are required in subsequent calculations. The name of the satellite will be retrieved as the connection is made to our data sources in the background.
Thruster Settings: If your spacecraft has a propulsion system and the manuever strategy (to be covered later in this section) is long-term and/or short term, this is a mandatory section that needs to be filled out. The input parameters here would further define the thruster's capabilities such as Thrust Output, Maximum Thrust Duration, Pointing uncertainities and others.
Drag Maneuver Settings: If your spacecraft do not contain a propulsion system, then this section is mandatory. The input parameters in this section shall be useful for making manuever suggestions using the drag of the spacecraft in orbit.
Risk Assessment Settings: The platform uses AI for risk prediction to help you make informed decisions on next steps. You can opt-in or opt-out from this feature.
Collision Avoidance Settings: The Collision Avoidance Settings contains a list of input parameters that will influence the collision avoidance manuevers in case it is needed by your spacecraft during its lifetime. The most important input parameter is the Manuever Strategy. The Manuever Strategycan be Drag or Long-term and/or Short-term.
These setting also contain other input parameters which are set to default value. Accepted Collision Probablity has been set to 0.0001 and Accepted Minimum Distance is set to 1 kilometers by default. You can modify them. Both are considered when analysing close approaches. When either of the limits are reached or exceeded, a close approach is classified as critical.
Notifications: More information on Notification can be found here.
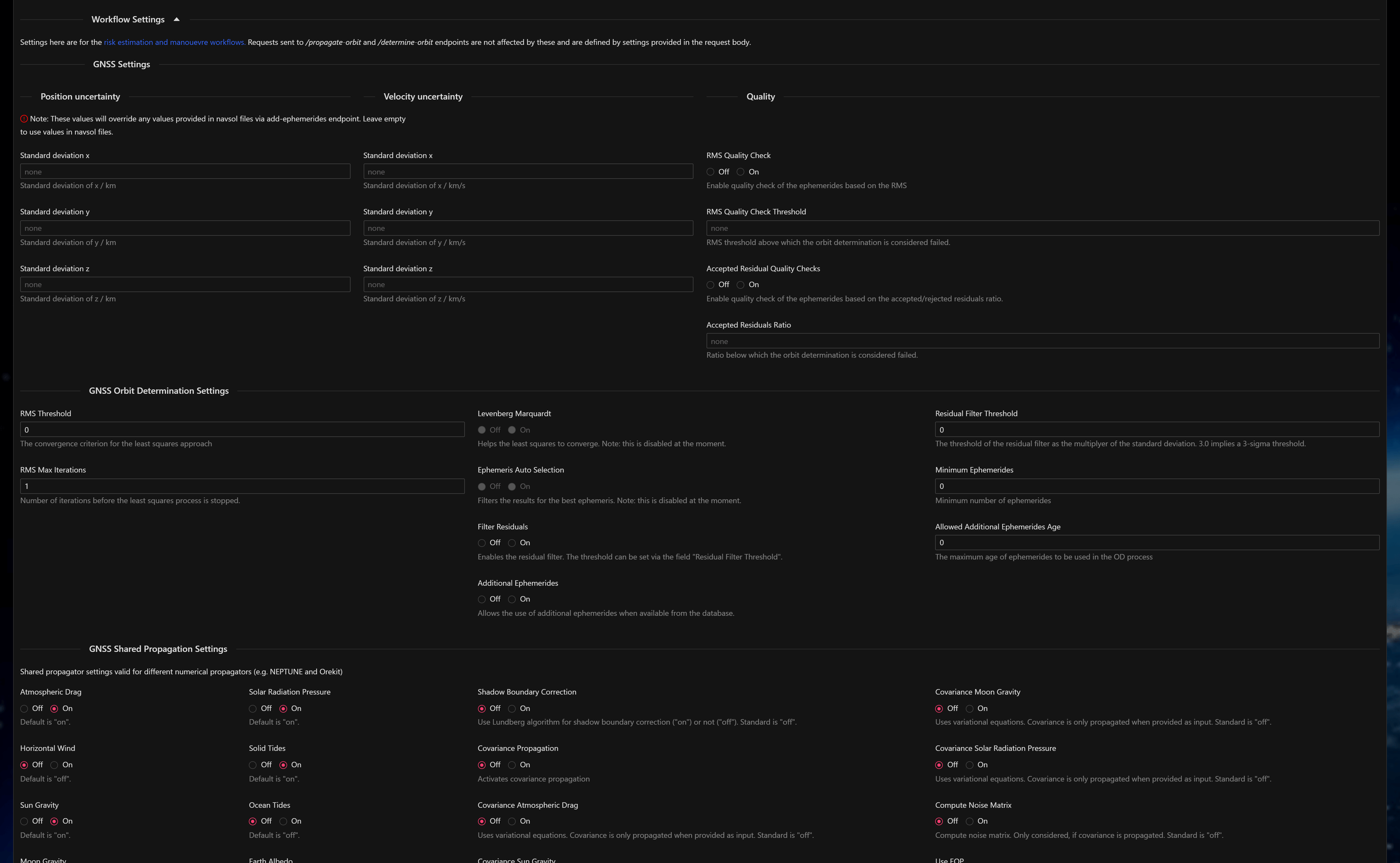
Workflow Settings: Workflow Settings delves deeper by obtaining datasets from GNSS. The input parameters checks for any uncertainty in position and velocity (covariances), ensures accurate orbit determination, is used for setting propagation parameters which is essential for predicting future positions. Feel free to input the values for the parameters known by you since it will help us calculation of risk estimation and risk prediction.
Note #1: Once you have entered all your information, click on Save. You will be returned to the satellite view and you can see your satellite in the list. The Screening Status will be Inactive initially. This means that we are checking the information you provided for your satellite and taking care of connecting the correct data. Once we have checked all data and received conjunction data messages for your satellite, the status of the satellite will be set to Active.
Note #2: We need to know whether you have already an SSA sharing agreement in place with the 18th SPCS. This allows us to interchange orbital data which are made available by USSPACECOM. We assist you in this setup phase. Please refer to the API documentation if you would like to upload CDMs from different sources.
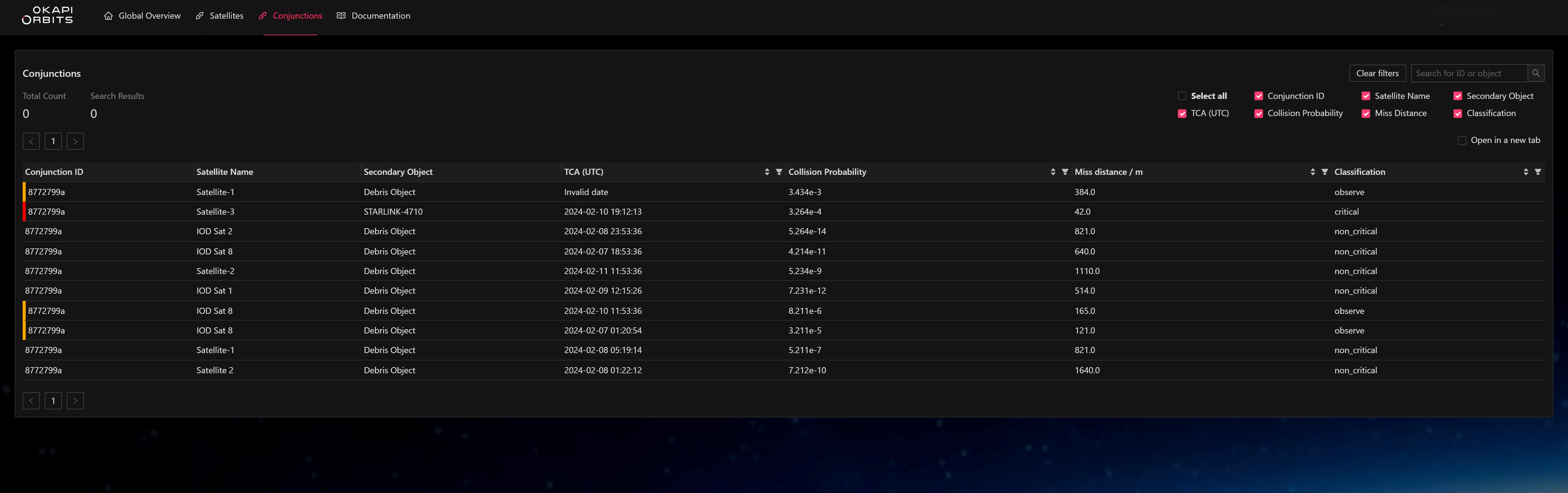
Conjunctions
Once the setup is finished and we receive information on your spacecraft, conjunction warnings are available.
The Conjunctions tabs provides the user with the list of all the upcoming conjunctions. On the left hand side of the table, the user can observe that each of the conjunctions are color coded. They are colored red when they are classified as critical and yellow when the event is under observation (observe). You can filter and sort your conjunctions based on the following parameters: Collision Probablity, Miss Distance, and Classification. You can also edit the columns that you want to be visible in the table. Finally, the page also provide you the opportunity to search a particular conjunction by Conjunction ID or object. After the backend receives a CDM, it is automatically processed. The collision probability is re-calculated using the additional data that is available using the Alfano-2005 method. "-OKP" in the data source names indicates this in the data labels (see Sources further down).
You can click on each of the conjunctions and you will be redirected to a new page (Conjunction Details) with more information. A guide to understanding Conjunction detail is provided in the upcoming section.
Conjunction Details
The Conjunction Details page provides detailed information about a particular conjunction. The landing page has some basic information such as: TCA, Time until TCA, Probability of risk increase, Probability of being critical at TCA. There are also options to customise the screen Add Card, Unlock Grid and the CDMs page that contains all CDMs used for this event.
The page is further sub-divided into two major tabs: Risk Monitoring and Collision Avoidance
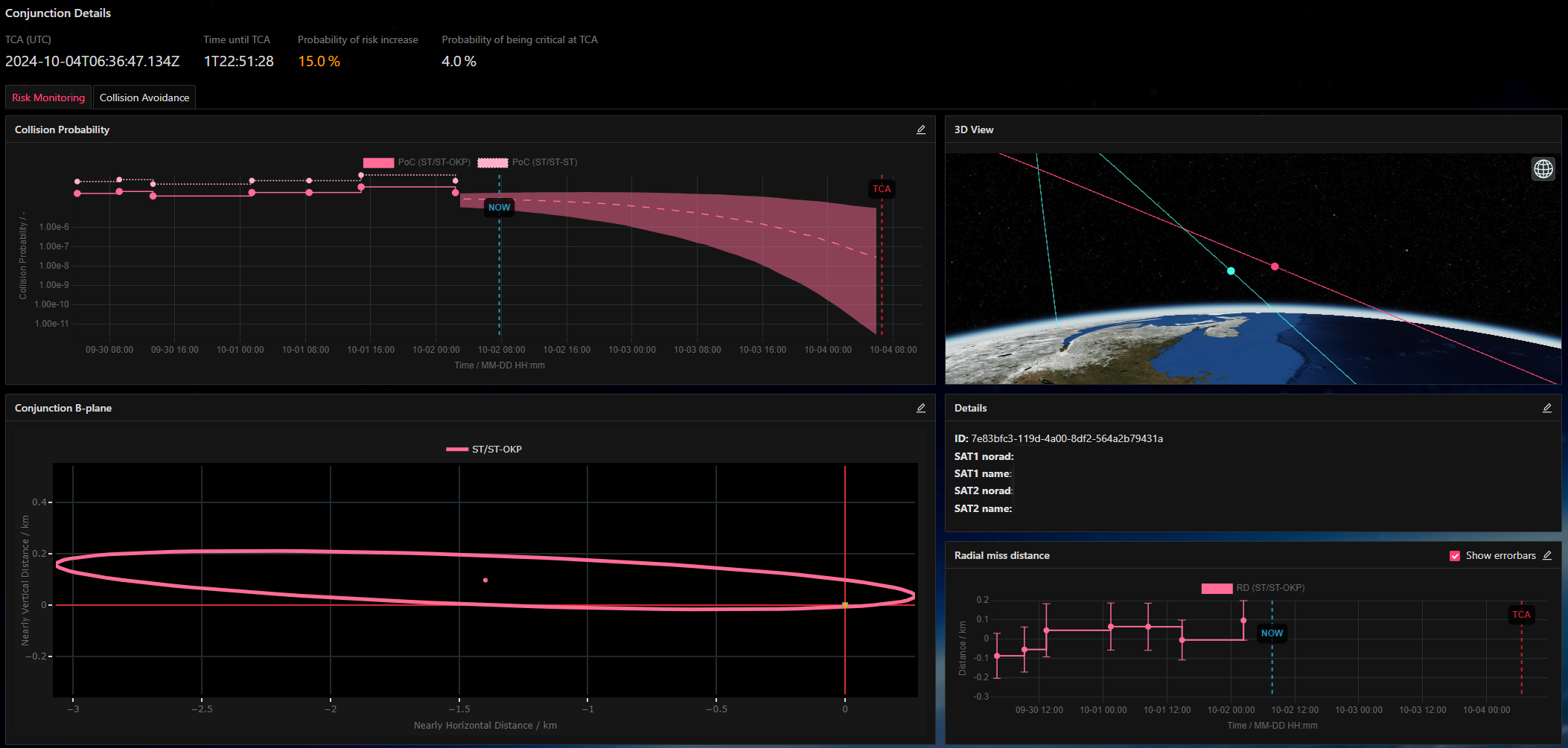
Starting with the Risk Monitoring tab, it contains the following plots:
a. Collision Probability
Displays the collision probability based on the sources of data available: GNSS SPACE_TRACK
Also, located in the top right corner of the plot there is an edit button. The user can choose to display risk trend and the risk percentiles predicted until TCA.
b. Mahalanobis Distance
Shows the evolution of the Mahalanobis distance across the lifetime of the conjunction. In the context of a conjunction, the Mahalanobis distance how statistically significant the miss-distance between the conjunction partners is taking into account the uncertainties in both primary and secondary objects.
c. Total miss distance
Along with the:
-
Cross track distance
-
Along track distance
-
Radial miss distance
d. Conjunction B-plane
Shows the b-plane of the most up to date risk estimation. The B-plane is the imaginary plane perpendicular to the relative velocity of both objects at TCA, centered on the primary object. The b-plane shows, at the origin, the combined hard body radius of two objects plus the projection of the combined 1-sigma covariance ellipsoid, at the relative position of the secondary object. Allows to simplify the analysis of the conjunction geometry using 2 dimensions instead of 3.
All plots have NOW and TCA marked and can be edited and resized. By clicking on data sources these can be removed or added to the plot and by hovering over the data points a pop up will show the exact values.
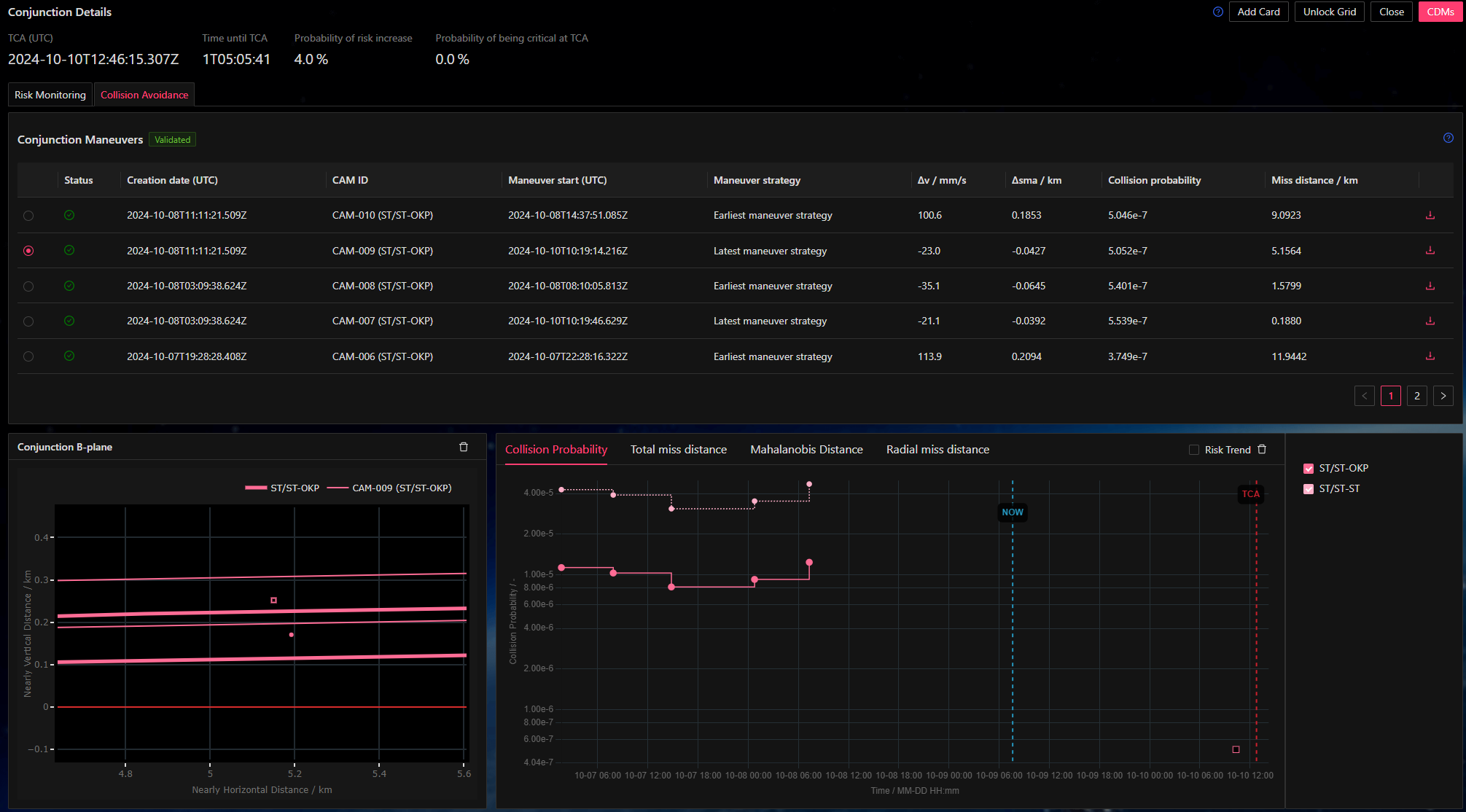
Let's explore the other tab now: Collision Avoidance.
The Collision Avoidance tab is used to explore all the possible maneuver strategy in case of a conjunction. The different maneuver strategies possible is shown under Conjunction Maneuvers. The different manuever strategies are generated depending on your requirement (latest, earliest or drag). Maneuvers are generated with the goal of increasing the miss distance and reducing the collision probability. These two values after the maneuver can be found in the table as well. Multiple target orbit candidates are generated. Hohmann maneuvers are assumed for transfers with changes in the radial miss distance for short-term avoidance strategies. For early maneuvers, a 25 km along-track separation is the target.
The status column shows if the manuever is possible or not. Based on the given propulsion system and maximum thrust duration multiple thrust epochs can be generated. Generated maneuvers can be downloaded for review. They have been screened by us against the SP catalogue of 18th SPCS. Some maneuvers will be shown as Dismissed Maneuver. These either lead to new close approaches or a given strategy is no longer applicable, as a maneuver cannot be performed before the event occurs.
For each of the maneuvers, you can compare different metrics in the plots below. There are four different plots which shows how different maneuvers affect the following parameters: Collision Probability, Miss Distance, Mahalanobis Distance, and Radial Miss Distance.
Sources
The conjunction data source tags follow the convention (obj1 source) / (obj2 source) - (risk-estimation source). OKP/OKP-OKP would indicate that obj1 and obj2 source are measurements obtained by OKAPI:Orbits' sensor networks, followed by risk-estimation based on these, also performed by OKAPI:Orbits. Further examples:
| ST | Space-Track CDMs |
|---|---|
ST/ST-ST |
Space-Track CDM |
STE/ST-ST |
Space-Track CDM with operator eph for primary |
ST/STE-ST |
Space-Track CDM with operator eph for secondary |
STE/STE-ST |
Space-Track CDM with operator eph for primary and secondary |
| OKP | Space-Track CDMs with OKAPI:Orbits' Risk-Estimation |
ST/ST-OKP |
Reprocessed Space-Track CDM |
STE/ST-OKP |
Reprocessed Space-Track CDM with operator eph for primary |
ST/STE-OKP |
Reprocessed Space-Track CDM with operator eph for secondary |
STE/STE-OKP |
Reprocessed Space-Track CDM with operator eph for primary and secondary |
SP/ST-OKP |
Reprocessed Space-Track CDM with primary from the Space-Track SP catalogue |
ST/SP-OKP |
Reprocessed Space-Track CDM with secondary from the Space-Track SP catalogue |
SP/STE-OKP |
Reprocessed Space-Track CDM with primary from the Space-Track SP catalogue and operator eph for secondary |
STE/SP-OKP |
Reprocessed Space-Track CDM with operator eph for primary and secondary from the Space-Track SP catalogue |
SP/SP-OKP |
Reprocessed Space-Track CDM with both primary and secondary from the Space-Track SP catalogue |
| GNSS, OP | Operator / Owner Data CDMs |
GNSS/ST-OKP |
Reprocessed Space-Track CDM based on GNSS for primary |
OP/ST-OKP |
Reprocessed Space-Track CDM based on uploaded eph through Aether for primary |
SP/OP-OKP |
Reprocessed Space-Track CDM based on Space-Track SP catalogue for primary and uploaded eph through Aether for secondary |
OP/SP-OKP |
Reprocessed Space-Track CDM based on uploaded eph through Aether for primary and Space-Track SP catalogue for secondary |
Understanding Risk Estimation and Risk Prediction
Risk Estimation
For the re-calculation of the collision probability three entities of both collision partners are needed:
- The size of the objects, which lead to the respective collision cross sections,
- The positions and velocities in space and
- The position and velocity uncertainties expressed through the covariance matrix.
Initially the data is taken from the CDMs distributed by 18th SPCS (Space-Track). Resident space objects (also known as RSOs) in the CDMs are associated to one of four categories. Each category has an assumed size. The categories are:
- Payload with an assumed object radius of 5 m,
- Rocket Body with an assumed object radius of 3 m,
- Unknown with an assumed object radius of 3 m and
- Debris with an assumed object radius of 1 m.
Due to the underlying method of the determining the collision probability, the satellite's size has a quadratic influence on the outcome of the calculation. Thus using a realistic estimate for your own satellite (instead of the assumed 5 m) will have a big impact on the computed result.
Currently all internal computations are performed using the Alfano-2005 method. Our backend however also offers many different approaches, which can be accessed via our API:
When you want all methods processed at the same time, you can use the all-methods endpoint. Depending on the guidelines you are trying to follow or conjunction type a different method might apply to your case. Please contact us when you need any other collision probability method as the default for your satellite.
For the risk estimation classification two criteria are used as a set of thresholds. While setting up a satellite the user can define both. These are:
- the minimum miss distance in meters and
- the accepted collision probability level (also ACPL).
When either the estimated miss distance is smaller than the minimum or the collision probability is bigger than the defined ACPL, the conjunction is classified to be critical. If the collision probability is smaller than the ACPL but bigger than 10.0 * ACPL the event is set to observe. Any other events are non critical.
Risk Prediction
As many operation teams struggle with finding the correct approach to handling conjunctions, even with the above thresholds in place, a couple of questions remain:
- When to act on a conjunction?
- Is the collision probability going to change until TCA?
To address these questions OKAPI:Orbits developed a method to predict the collision probability for most events until TCA. It uses knowledge of the workings of SSA systems and machine learning techniques to extrapolate the collision probability.
So how does it work?
Looking at the general (3D) method of how the collision probability, which is formulated as: $$P_c = \frac{1}{\sqrt{\left(2\cdot\pi\right)^3 \cdot det\left(C\right)}}\int_{V_c} exp\left[ -\frac{1}{2}\Delta\vec{r}^T\cdot C^{-1} \cdot \Delta\vec{r}\right] dV$$ it becomes apparent that the three entities:
- Objects' size, expressed as the combined volume Vc,
- Miss distance, expressed as the vector between both positions r and
- Position uncertainties, expressed as the combined covariance C,
define the collision probability computation. We already addressed the sensitivity of the objects' sizes in regard to the computed probability. But while for many of the CDMs the size of the space objects remain constant and the computed position and velocity forecasts have a comparably low variation, the uncertainties shows significant (and predictable) variation. They also have a big impact on the outcome of the collision probability computation.
The variation of the position uncertainties stem from routinely updates by the underlying SSA system, which issues the CDMs. While observing and re-observing objects the state vectors of the space objects are updated in the catalogue. As time progresses and the TCA draws closer the uncertainties from the object propagation decrease, as the forecast timespan is reduced and thus the accuracy of the result is increased. This is a clear trend. As we get closer to the TCA, and the SSA system updates its knowledge of the respective object the position and velocity uncertainties are reduced. From this predictable behaviour of the system we can learn how a final uncertainty can look like, taking into account the orbits and sizes of the objects, the estimated updated frequencies of the objects in the catalogue and the expected quality of the orbit determination and propagation of the SSA system.
The expected decrease of the covariance of both collision partners is a function of the factors stated above and can be learned from a large collection of CDM events. The data is first clustered into different categories (by size and orbit) of collision partners and later multiple non-linear regression theories are applied to extract the model used to rebuild the uncertainties for different types of events. By modelling the expected uncertainty for each object of the conjunction in finite steps until the TCA, a prediction of the collision probability can be achieved under the assumption that the size of the objects is constant and the miss distance does not vary greatly.
When enabling the use of the collision probability prediction the classification of a conjunction event is adapted based on the risk trend. While the criterium of the miss distance remains identical to the one in the risk estimation service, the collision probability is interpreted differently. When the risk trend shows that the estimated collision probability at TCA will be above the defined ACPL, the conjunction is classified to be critical. When at any time until TCA the projected trend is above the ACPL, the event is set to observe. Any other events are non-critical. This approach will estimate to the best of the available data a decreasing and an increasing trend from the very first collision warning available.
API
All features you can observe in the web interface are also available via API, so your operation systems can directly be interfaced in a machine-to-machine manner with our platform. Our services are accessible via a REST API. This means that you can communicate with it via HTTP requests. Currently supported are POST, GET, UPDATE and DELETE methods. Send a POST request to our server to start a calculation, e.g. an orbit propagation or pass prediction computation. Once the computation is done, the results are collected by sending a GET request. All available endpoints can be found in our API documentation.
OKAPI:Orbits also provides SDKs to simplify access to platform services. See the connectors page for an overview.
Prerequisites: Before going through the introductions below, make sure that you have an account with OKAPI:Orbits.
Security and Privacy
The OKAPI:Orbits platform uses auth0 as identity provider. All registered user data resides in a safe database. The OKAPI:Orbits services use an OAuth 2.0 password grant type, which results in an access token based on your credentials. It is then used by the application to authenticate to gain access to the services.
During the sign up for our platform and services you have to take notice of our privacy policy. The Auth0 statement can be found in the Data protection provisions about the application and use of Auth0